Workspace Aware Online Grasp Planning
Iretiayo Akinola, Jacob Varley, Boyuan Chen and Peter Allen
Abstract
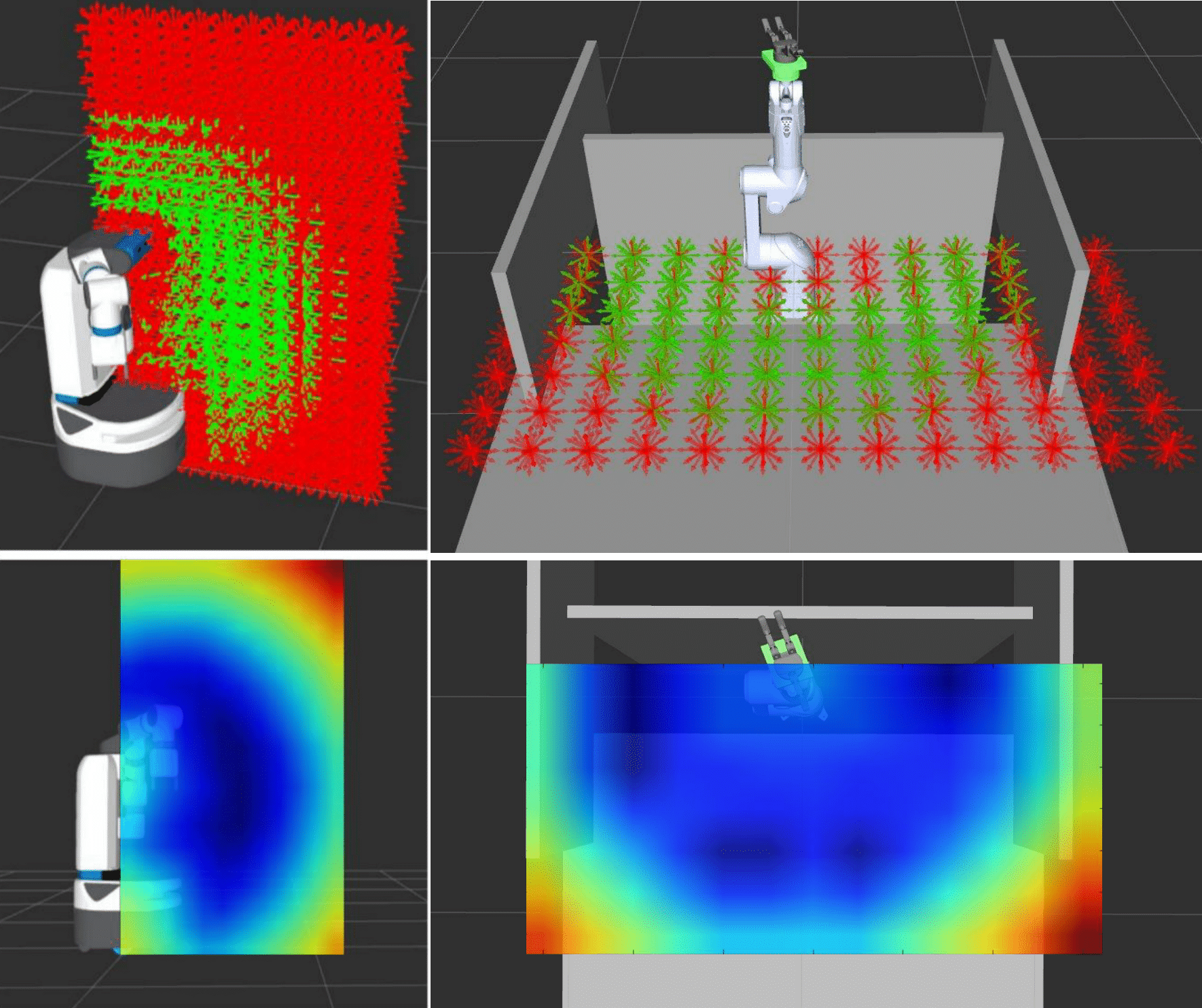
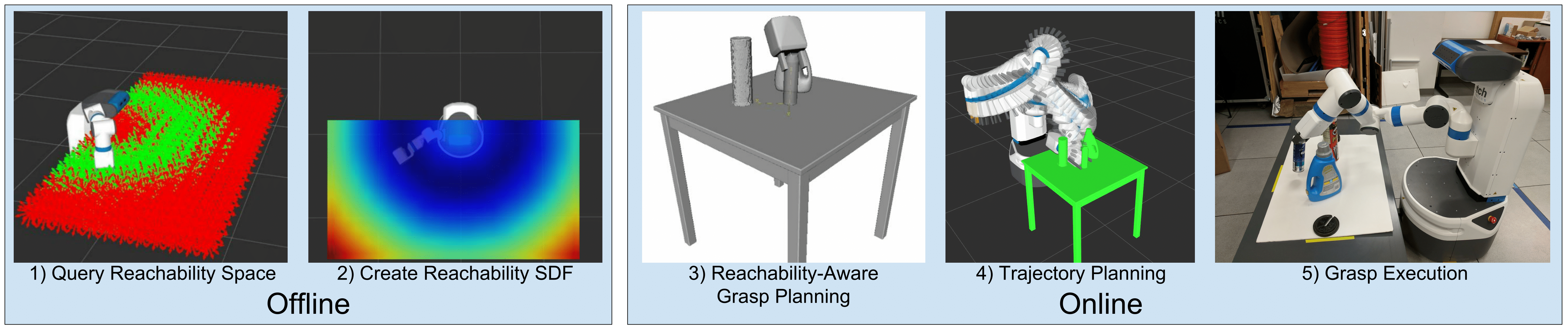
This work provides a framework for a workspace aware online grasp planner. This framework greatly improves the performance of standard online grasp planning algorithms by incorporating a notion of reachability into the online grasp planning process. Offline, a database of hundreds of thousands of unique end-effector poses were queried for feasability. At runtime, our grasp planner uses this database to bias the hand towards reachable end-effector configurations. The bias keeps the grasp planner in accessible regions of the planning scene so that the resulting grasps are tailored to the situation at hand. This results in a higher percentage of reachable grasps, a higher percentage of successful grasp executions, and a reduced planning time. We also present experimental results using simulated and real environments.
Video
Links
- Paper: This work was submitted to IROS 2018. Arxiv link here
- Top level workspace here
- Code for Reachability space generation here
- Reachability Space Data for Fetch Robot and Staubli-Barrett Hand