David Watkins-Valls*,
Jingxi Xu*,
Nicholas Waytowich, and
Peter Allen
Columbia Robotics Lab
Abstract
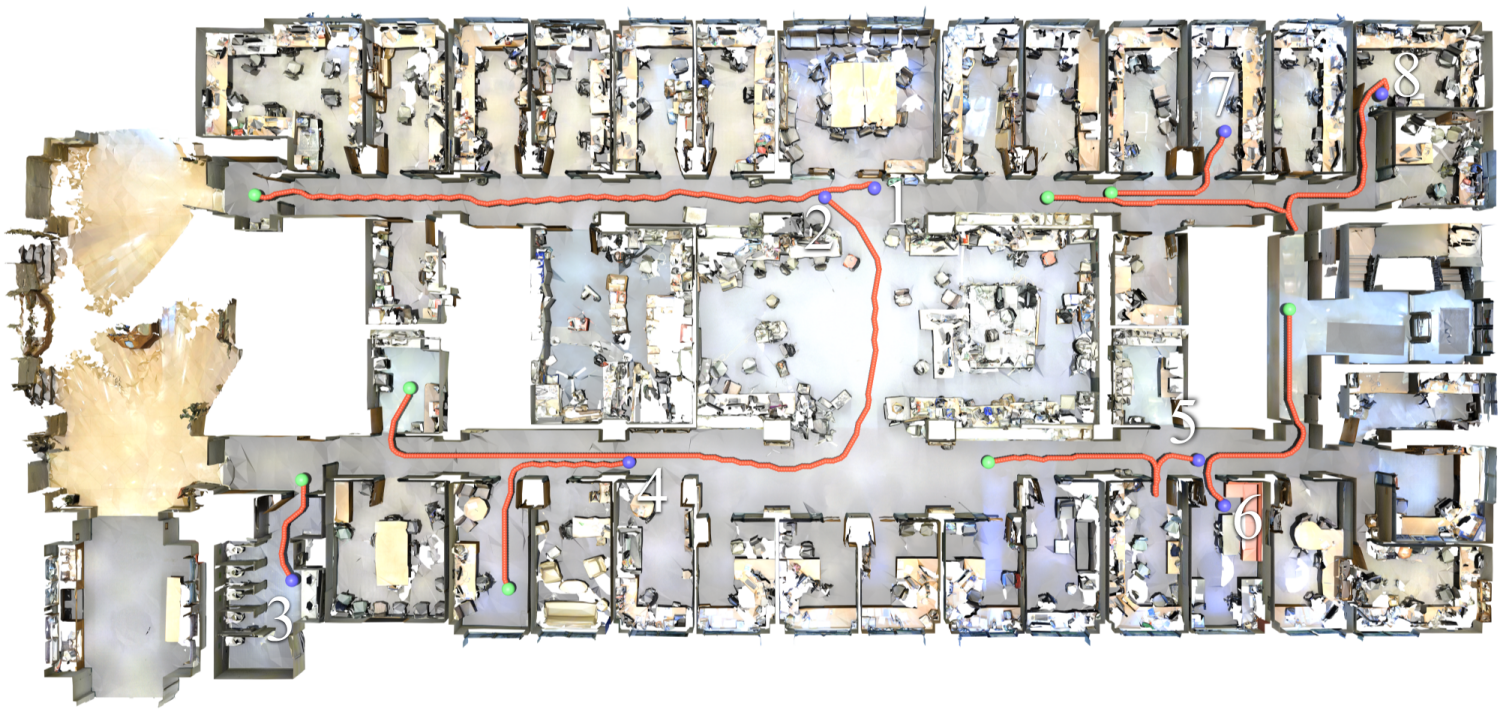
We present a robot navigation system that uses an imitation learning framework to successfully navigate in complex environments. Our framework takes a pre-built 3D scan of a real environment and trains an agent from pre-generated expert trajectories to navigate to any position given a panoramic view of the goal and the current visual input without relying on map, compass, odometry, GPS or relative position of the target at runtime. Our end-to-end trained agent uses RGB and depth (RGBD) information and can handle large environments (up to 1031m2) across multiple rooms (up to 40) and generalizes to unseen targets. We show that when compared to several baselines using deep reinforcement learning and RGBD SLAM, our method (1) requires fewer training examples and less training time, (2) reaches the goal location with higher accuracy, (3) produces better solutions with shorter paths for long-range navigation tasks, and (4) generalizes to unseen environments given an RGBD map of the environment.
Video
Citation
If you use Learning Your Way in your work please cite our paper!
@misc{
1909.09295,
Author = {David Watkins-Valls and Jingxi Xu and Nicholas Waytowich and Peter Allen},
Title = {Learning Your Way Without Map or Compass: Panoramic Target Driven Visual Navigation},
Year = {2019},
Eprint = {arXiv:1909.09295},
}
Arxiv link here
Acknowledgements
*Authors have contributed equally and names are in alphabetical order
1Department of Computer Science, Columbia University, New York, NY, USA. {davidwatkins, allen} at cs dot columbia dot edu, jingxi dot xu at columbia dot edu
2U.S. Army Research Laboratory, Baltimore, MD, USA. nicholas dot r dot waytowich dot civ at mail dot mil
This work is supported by NSF Grant CMMI 1734557. This research was sponsored by the Army Research Laboratory and was accomplished under Cooperative Agreement Number W911NF-18-2-0244. The views and conclusions contained in this document are those of the authors and should not be interpreted as representing the official policies, either expressed or implied, of the Army Research Laboratory or the U.S. Government. The U.S. Government is authorized to reproduce and distribute reprints for Government purposes notwithstanding any copyright notation herein.
The title is an homage to Harold Gatty's book Finding Your Way Without Map or Compass.
