Iretiayo Akinola*, Jingxi Xu*, Shuran Song, and Peter Allen
Columbia Robotics Lab
Abstract
Grasping in dynamic environments presents a unique set of challenges. A stable and reachable grasp can become unreachable and unstable as the target object moves, motion planning needs to be adaptive and in real time, the delay in computation makes prediction necessary. In this paper, we present a dynamic grasping framework that is reachability-aware and motion-aware. Specifically, we model the reachability space of the robot using a signed distance field which enables us to quickly screen unreachable grasps. Also, we train a neural network to predict the grasp quality conditioned on the current motion of the target. Using these as ranking functions, we quickly filter a large grasp database to a few grasps in real time. In addition, we present a seeding approach for arm motion generation that utilizes solution from previous time step. This quickly generates a new arm trajectory that is close to the previous plan and prevents fluctuation. We implement a recurrent neural network (RNN) for modelling and predicting the object motion. Our extensive experiments demonstrate the importance of each of these components and we validate our pipeline on a real robot.
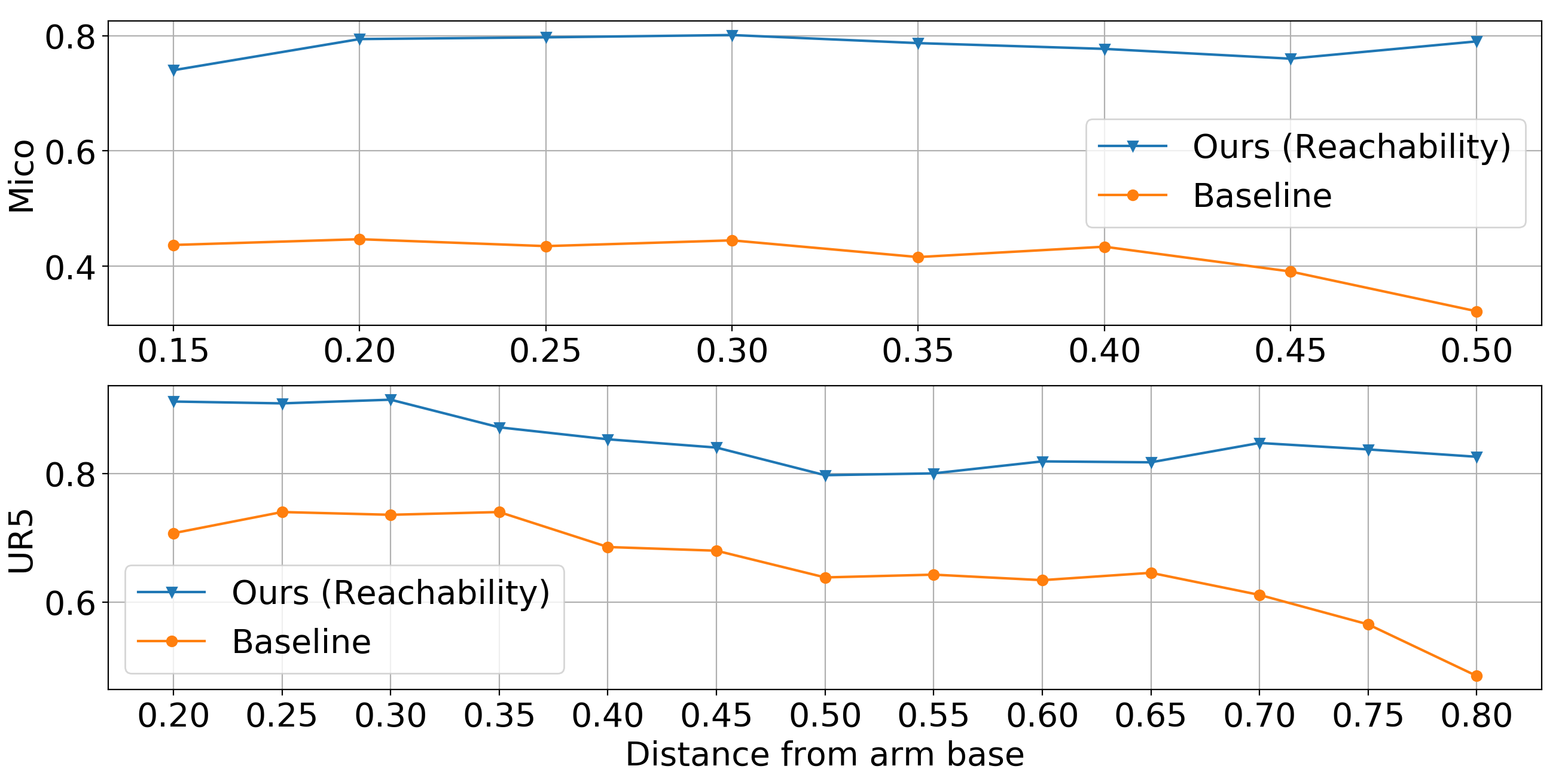
Reachability Awareness effectively expands the usable workspace of the robot
Improvement from reachability awareness becomes more significant when the moving object is extremely close to or far from the robot (See Figure below).
Paper (ArXiv)
https://arxiv.org/abs/2103.10562
Code (GitHub)
https://github.com/jingxixu/dynamic-grasping
Video
Supplementary Video (1 min)
IROS 2021 Presentation Video (15 mins)
Bibtex
@inproceedings{akinola2021dynamic,
title={Dynamic grasping with reachability and motion awareness},
author={Akinola, Iretiayo and Xu, Jingxi and Song, Shuran and Allen, Peter K},
booktitle={2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={9422--9429},
year={2021},
organization={IEEE}
}